Autoguiado GPS de tractores
Definición y revisión
Desde principios de este siglo han estado popularizándose los sistemas de asistencia al guiado GPS de tractores. Estos sistemas son sencillos de instalar en los tractores y son económicos, pero ofrecen una precisión moderada, ya que sólo consiguen un guiado con errores inferiores al metro, denominándose comúnmente a esta precisión como precisión submétrica.
Hay labores agrícolas en las que es conveniente una precisión mayor en el guiado, de forma que las desviaciones del tractor sobre la trayectoria deseada sean de tan sólo unos centímetros, lo que se denomina precisión centimétrica. Esta precisión la consiguen los sistemas de autoguiado GPS de tractores, que son una evolución de los sistemas de asistencia GPS, y son capaces de actuar sobre la dirección del tractor, liberando al conductor del tractor de la tarea de mover el volante en las pasadas que se llevan a cabo en la parcela.
En la actualidad, año 2017, hay sistemas comerciales de autoguiado GPS de tractores que (i) consiguen que el tractor realice pasadas equiespaciadas con errores del orden de centímetros, y que (ii) consiguen que la distancia entre dos pasadas, de un año para el siguiente, sea también del orden de centímetros.
Investigación realizada
Cuatro han sido mis contribuciones al campo del autoguiado GPS de tractores: (i) un artículo que realiza un estudio sobre leyes de control del guiado de tractores con receptores GPS económicos, (ii) un artículo que presenta una nueva ley de control para el guiado GPS de tractores, (iii) un artículo que presenta un procedimiento para mejorar de una forma simple la precisión en el guiado GPS de tractores, y (iv) mi colaboración con la empresa Tractordrive. A continuación, se presenta información sobre estas cuatro contribuciones.
Sergio Alonso García fue un alumno al que dirigí su Proyecto Final de Carrera, que presentó en el año 2007. En dicho proyecto, Sergio evaluó la precisión que se consigue en el autoguiado GPS de tractores cuando se emplean receptores GPS económicos, cuyo coste es menor que 100€. Realizó este estudio evaluando tres diferentes leyes de control, y realizando las pruebas reales en el tractor de la explotación de su familia, al que tuvo que adaptar para que un ordenador moviese la dirección. La Figura 1 muestra las adaptaciones realizadas. El estudio fue publicado en una revista de investigación (Alonso-Garcia, Gomez-Gil, and Arribas 2011).
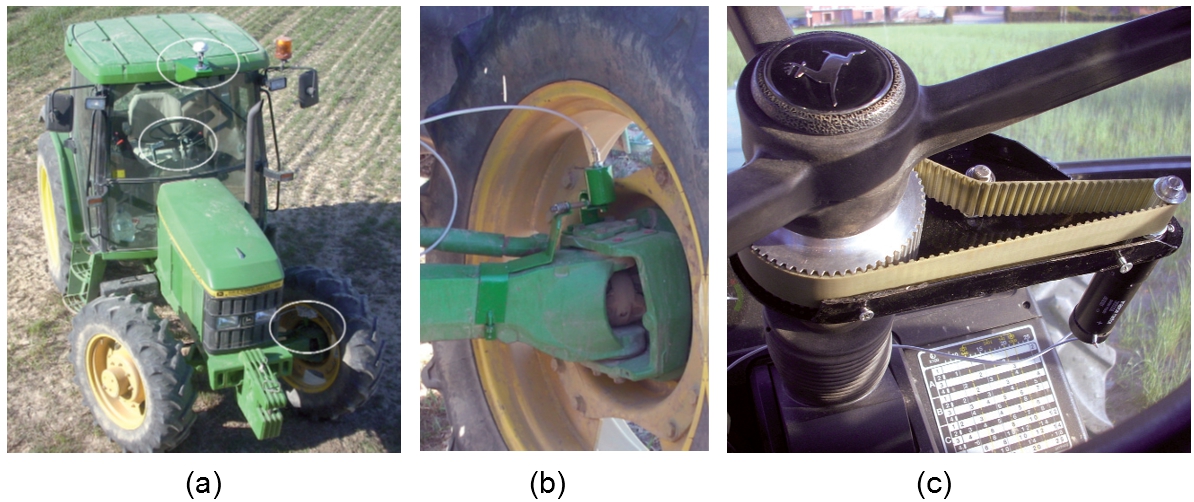
Figura 1: Fotos del tractor del alumno Sergio, adaptado para ser guiado autónomamente mediante un ordenador, donde se aprecia (a) la visión del tractor desde el exterior con tres marcas elípticas que localizan los elementos principales del sistema de guiado autónomo, (b) encoder que mire el ángulo de dirección de las ruedas delanteras del tractor, y (c) motor eléctrico con correa dentada para mover la dirección.
En el año 2008 realicé una estancia al Departamento de Ingeniería Mecánica de la Universidad de Delaware, EEUU, invitado por el profesor Sunil K. Agrawal. Allí conocí a Ji-Chul Ryu, un estudiante que investigaba bajo la dirección de Agrawal, con quien trabajamos en la aplicación al campo del guiado GPS de tractores de una ley de control empleada por ellos en robots. Esta ley de control tiene la característica de converger rápidamente en el guiado con orientaciones iniciales desviadas más de 90º de la trayectoria deseada, característica que no cumplen otras populares leyes de control empleadas en el autoguiado GPS de tractores. Realizamos juntos un estudio teórico de esta ley, y a mi vuelta a España, realicé, junto con Sergio Alonso Garcia, las pruebas reales en un tractor. El resultado del trabajo fue publicado en un artículo de revista (Gomez-Gil, Ryu, et al. 2011). Las Figuras 2 y 3 muestran dos imágenes representativas de este artículo.
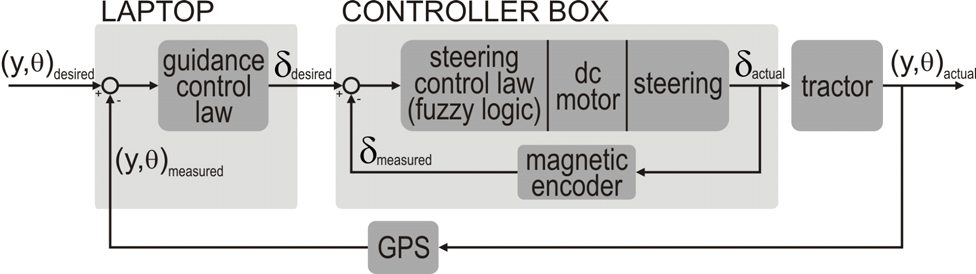
Figura 2: Diagrama de bloques del sistema implementado en el tractor para el testeo de la ley de control.
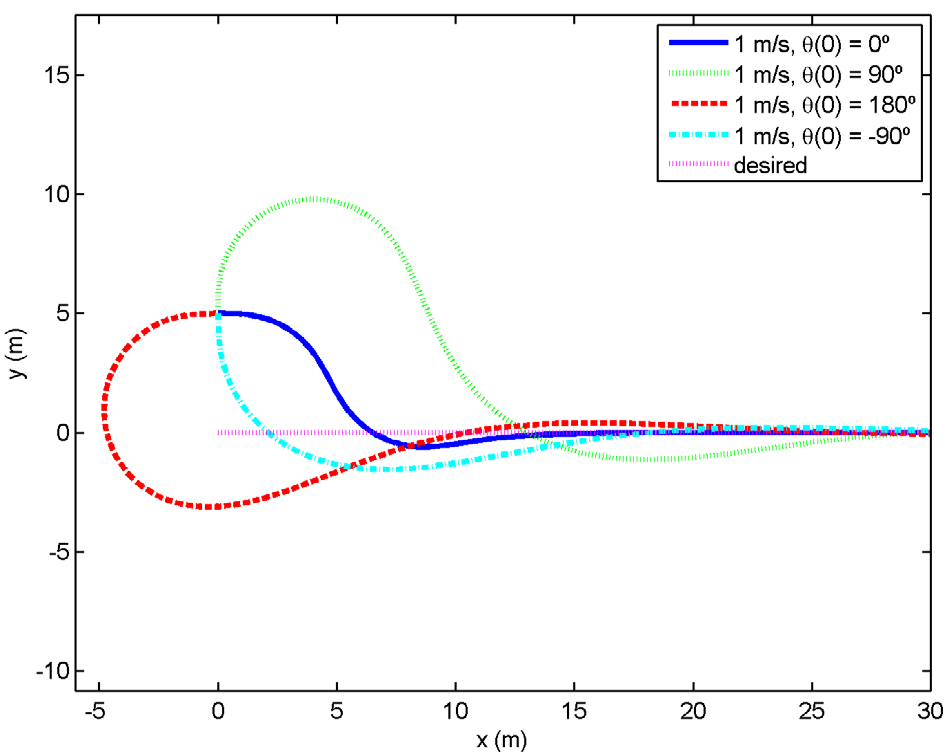
Figura 3: Trayectoria seguida por el tractor, cuando el error en distancia inicial del tractor es 5 metros, y cuando el rumbo inicial del tractor está desviado con respecto al rumbo deseado 0º, 90º, -90º y 180º.
Durante los años 2005 al 2010 tuve la ocasión de experimentar con sistemas de asistencia al guiado GPS de tractores, y con sistemas de autoguiado GPS de tractores. Realicé pruebas variando parámetros del guiado, y variando la posición de la antena con respecto al tractor. Observé que, posicionando la antena adelantada, los sistemas eran más sensibles a los cambios en dirección. Esa observación me llevó a plantear un estudio sobre la influencia del adelanto en la posición del receptor GPS en sistemas GPS para tractores. Este estudio fue publicado en una revista científica (Gomez-Gil, Alonso-Garcia, et al. 2011). La Figura 4 muestra imágenes representativas de dicho estudio.
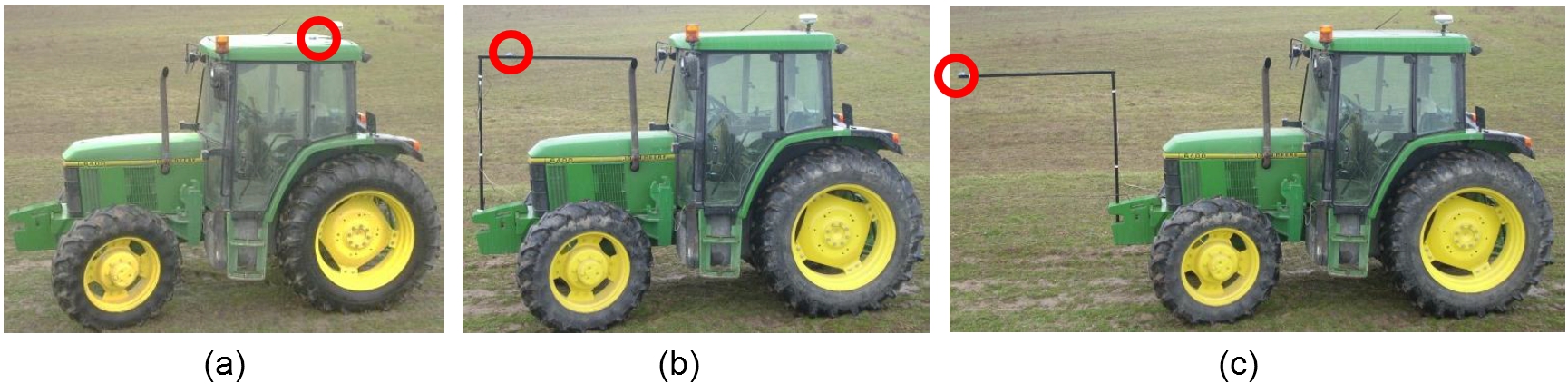
Figura 4: Diferentes posiciones de un receptor GPS Haicom HI-204III en pruebas de campo para el autoguiado GPS de un tractor. La posición del receptor GPS está resaltada con una circunferencia roja. (a) El receptor GPS está colocado donde se une la vertical del centro del eje trasero del tractor con el techo de la cabina. (b) El receptor GPS está colocado 3 metros adelantado con respecto al punto anterior. (c) El receptor GPS está colocado 5 metros adelantado con respecto al punto inicial de (a).
El alumno Sergio realizó conmigo su PFC y su Tesis doctoral, ambos proyectos sobre el guiado GPS de tractores. Además, en nuestras numerosas horas de trabajo juntos conversé con la empresa Agroguía, empresa en la que yo colaboraba. Sergio, alumno trabajador y de carácter emprendedor, montó y vendió algún equipo GPS para tractores a agricultores conocidos. El buen funcionamiento de esos equipos hizo que Sergio crease la empresa Tractordrive (www.tractordrive.es, ver Figura 8). Esta empresa comenzó con el desarrollo de sistemas de asistencia al guiado GPS de tractores, y a partir del año 2016 está ofreciendo sistemas de autoguiado GPS de tractores.

Figura 5: Capturado de pantalla de la web www.tractordrive.es.
Figura 5: Una oferta concreta que en el año 2016 se pudo encontrar en la web www.tractordrive.es